
Avian Physics 0.3 has been released! 🪶
Avian is an ECS-based 2D and 3D physics engine for Bevy, a refreshingly simple data-driven game engine built in Rust. Avian prioritizes ergonomics and modularity, with a focus on providing a native ECS-driven user experience.
Check out the GitHub repository and introductory post for more details.
Highlights
Avian 0.3 is another huge release, with several new features, quality-of-life improvements, and important bug fixes. Highlights include:
- Opt-in contact reporting: Collision events are now only sent for entities that have the
CollisionEventsEnabledcomponent, reducing unwanted overhead and iteration. - Observable collision events: Observers finally support collision events, making it easy to define per-entity collision handlers.
- Collision hooks: Users can “hook into” the collision pipeline, making it possible to efficiently filter and modify contacts.
- Per-manifold material properties: Friction, restitution, and tangent velocity can be modified for contact manifolds, allowing the simulation of non-uniform materials and conveyor belts.
- Collider context: Custom colliders that implement
AnyColliderhave aContextfor ECS access. - Physics diagnostics: Avian has built-in diagnostics and a debug UI for runtime physics profiling.
- Reworked contact pair management: Contacts have been massively reworked to reduce allocations and unnecessary work while increasing parallelism.
- Faster collisions and spatial queries: Collisions and spatial queries have much less overhead.
- Bevy 0.16 support: Avian has been updated to the latest version of Bevy, and is taking advantage of relationships for attaching colliders to rigid bodies.
The migration guide and a more complete changelog can be found on GitHub.
Opt-In Contact Reporting
In previous releases, Avian has sent the CollisionStarted, CollisionEnded, and Collision
events for all contact pairs. This had fairly significant overhead for contact-heavy
scenarios, and often resulted in unnecessary iteration in user code. You rarely need
collision events for every collider in the world.
Avian 0.3 introduces a new CollisionEventsEnabled component that can be added to enable
collision events for a collider. Collision events are only sent for a contact between two entities
if either of the colliders involved has this component.
commands.spawn((
RigidBody::Kinematic,
Collider::capsule(0.5, 1.5),
// Enable collision events for this collider.
CollisionEventsEnabled,
));If you wish to revert to the old behavior, consider making CollisionEventsEnabled a required component
for Collider to insert it automatically:
app.register_required_components::<Collider, CollisionEventsEnabled>();Finally, the Collision event no longer exists, as it unnecessarily duplicated lots of collision data.
Instead, use Collisions directly, or get colliding entities using the CollidingEntities component.
Observable Collision Events
The CollisionStarted and CollisionEnded events can be read with an EventReader.
However, in a lot of cases, you only care about collisions involving a specific entity,
such as when a character walks over pickups or steps on a pressure plate. With EventReader,
this required iterating through all events and checking which entities were involved in the collision,
which was both inefficient and unergonomic.
Avian 0.3 introduces new OnCollisionStart and OnCollisionEnd events that are triggered
for entities with the CollisionEventsEnabled component. They can be listened to with
Bevy’s observers, making them well-suited for per-entity collision handling.
A simple example of a pressure plate that logs a message when a player steps on it:
#[derive(Component)]
struct Player;
#[derive(Component)]
struct PressurePlate;
fn setup_pressure_plates(mut commands: Commands) {
commands.spawn((
PressurePlate,
Collider::cuboid(1.0, 0.1, 1.0),
Sensor,
// Enable collision events for this collider.
CollisionEventsEnabled,
))
// Observer for responding to collisions starting with the pressure plate.
.observe(|trigger: Trigger<OnCollisionStart>, player_query: Query<&Player>| {
// The trigger target is the entity that the observer is targeting.
let pressure_plate = trigger.target();
// The `collider` stored in the event is the entity that the target entity collided with.
// There is also a `body` field for the rigid body that the collider is attached to.
let other_entity = trigger.collider;
// Check if the entity colliding with the pressure plate is a player.
if player_query.contains(other_entity) {
println!("Player {other_entity} stepped on pressure plate {pressure_plate}");
}
});
}The buffered CollisionStarted and CollisionEnded events are still available, and are good
for efficiently processing large numbers of collisions between pairs of entities,
such as for playing sound effects on collision or responding to projectile hits.
Collision Hooks
Advanced contact scenarios often require filtering or modifying contacts with custom logic. Use cases include:
- One-way platforms
- Conveyor belts
- Non-uniform friction and restitution for terrain
In previous releases, Avian had a PostProcessCollisions schedule that made some of these
scenarios possible by allowing users to freely add systems to operate on collision data
before contact constraints were generated for the solver. However:
- It didn’t support filtering contact pairs in the broad phase, only after the narrow phase.
- It resulted in unnecessary iteration, as filtering and modification couldn’t be done directly when contacts are being created or added.
- It prevented important optimizations from being implemented (see Reworked Contact Pair Management).
As focus has shifted more towards performance, it became evident that PostProcessCollisions
was not the right approach. Instead, physics engines typically use hooks or callbacks that are called
during specific parts of the simulation loop.
Avian 0.3 introduces a new CollisionHooks trait that allows users to define custom hooks
for efficiently filtering and modifying contact pairs. It supersedes the PostProcessCollisions
schedule, and allows users to hook directly into the collision pipeline.
Defining Hooks
To define collision hooks, implement the CollisionHooks trait for a type implementing
ReadOnlySystemParam. The system parameter makes it possible to perform queries,
access resources, or otherwise read ECS data.
An example of hooks to support interaction groups and one-way platforms might look like this:
use avian2d::prelude::*;
use bevy::{ecs::system::SystemParam, prelude::*};
/// A component that groups entities for interactions.
/// Only entities in the same group can collide.
#[derive(Component)]
struct InteractionGroup(u32);
/// A component that marks an entity as a one-way platform.
#[derive(Component)]
struct OneWayPlatform;
// Define a `SystemParam` for the collision hooks.
#[derive(SystemParam)]
struct MyHooks<'w, 's> {
interaction_query: Query<'w, 's, &'static InteractionGroup>,
platform_query: Query<'w, 's, &'static Transform, With<OneWayPlatform>>,
}
// Implement the `CollisionHooks` trait.
impl CollisionHooks for MyHooks<'_, '_> {
// This is called in the broad phase, and acts as an early-out filter.
fn filter_pairs(&self, collider1: Entity, collider2: Entity, _commands: &mut Commands) -> bool {
// Only allow collisions between entities in the same interaction group.
// This could be a basic solution for "multiple physics worlds" that don't interact.
let Ok([group1, group2]) = self.interaction_query.get_many([collider1, collider2]) else {
return true;
};
group1.0 == group2.0
}
// This is called in the narrow phase, and allows modifying or rejecting contact pairs.
// Returning `false` will reject the contact, while returning `true` will keep it.
fn modify_contacts(&self, contacts: &mut Contacts, commands: &mut Commands) -> bool {
// Allow entities to pass through the bottom and sides of one-way platforms.
// See the `one_way_platform_2d` example for a full implementation.
let (entity1, entity2) = (contacts.collider1, contacts.collider2);
!self.is_hitting_top_of_platform(entity1, entity2, &self.platform_query, &contacts, commands)
}
}The hooks can then be added to the app using PhysicsPlugins::with_collision_hooks:
fn main() {
App::new()
.add_plugins((
DefaultPlugins,
PhysicsPlugins::default().with_collision_hooks::<MyHooks>(),
))
.run();
}It is rare to want hooks to run for every single collision pair. Thus, hooks are only called
for collisions where at least one entity has the new ActiveCollisionHooks component with
the corresponding flags set. By default, no hooks are called.
// Spawn a collider with filtering hooks enabled.
commands.spawn((Collider::capsule(0.5, 1.5), ActiveCollisionHooks::FILTER_PAIRS));
// Spawn a collider with both filtering and contact modification hooks enabled.
commands.spawn((
Collider::capsule(0.5, 1.5),
ActiveCollisionHooks::FILTER_PAIRS | ActiveCollisionHooks::MODIFY_CONTACTS
));
// Alternatively, all hooks can be enabled with `ActiveCollisionHooks::all()`.
commands.spawn((Collider::capsule(0.5, 1.5), ActiveCollisionHooks::all()));Per-Manifold Material Properties
The friction and restitution of a collider can be configured with the Friction and Restitution
components respectively. However, what if you wanted different friction or restitution
for different parts of a mesh, or wanted the material properties to change based on
the entities involved?
Avian 0.3 stores friction and restitution properties for each contact manifold,
allowing you to modify the surface material properties of individual contacts
inside CollisionHooks::modify_contacts.
// Inside a `CollisionHooks` implementation (see previous section)
fn modify_contacts(&self, contacts: &mut ContactPair, _commands: &mut Commands) -> bool {
// Iterate over all contact surfaces between the two colliders.
for manifold in contacts.manifolds.iter_mut() {
// Use a random coefficient of restitution between 0 and 1 for each contact.
// Because why not?
manifold.restitution = rand::random();
}
true
}Additionally, a new tangent_velocity property is provided to emulate the artificial movement
of contact surfaces, making it possible to simulate scenarios such as conveyor belts or speed pads.
The new conveyor_belt example
Physics Picking Filter
Avian has a PhysicsPickingPlugin that allows you to pick colliders in the world
using ray casts. In version 0.2, it required that the RenderLayers of cameras
and pickable colliders match, if specified. Using RenderLayers for mesh and sprite picking
makes sense to ensure that what you see is what you get, but for colliders,
there is no such connection to rendering or visuals. Instead, it would be
more useful to support the filtering options normally provided for ray casts.
Avian 0.3 introduces a PhysicsPickingFilter to filter pickable entities
using a SpatialQueryFilter.
// Only enable picking NPCs with this camera.
commands.spawn((
Camera2d,
PhysicsPickingFilter::from_mask(GameLayer::Npc),
));Physics Diagnostics
As Avian has grown, performance has been increasingly becoming more relevant. However, to really be able to detect bottlenecks and determine how changes affect performance, we need a way to profile the physics simulation.
Avian 0.3 introduces built-in diagnostics for physics timers and counters with minimal overhead.
The results are stored in separate resources like SolverDiagnostics and SpatialQueryDiagnostics
to ensure that you’re only tracking information for plugins that you actually use. Currently,
diagnostics are enabled by default and cannot be disabled.
Users could access and log these resources directly to monitor physics performance, but as we will see, there are also built-in features for visualizing them more conveniently.
Integration With DiagnosticsStore
Bevy has its own DiagnosticsStore for storing diagnostics information and reading it
with smoothing and other convenience features. To integrate with this, Avian 0.3
adds a bevy_diagnostic feature and PhysicsDiagnosticsPlugin for writing Avian’s
own diagnostics to the store.
app.add_plugins((
DefaultPlugins,
PhysicsPlugins::default(),
// Enable writing physics diagnostics to Bevy's `DiagnosticsStore`.
PhysicsDiagnosticsPlugin,
));You can access a specific physics diagnostic from the DiagnosticsStore resource
using the diagnostic path stored as an associated constant in the corresponding
diagnostics resource.
// Not sure when you'd want to log a single diagnostic, but you can do it :D
fn log_narrow_phase_time(diagnostics: Res<DiagnosticsStore>) {
// Get the diagnostic.
let Some(diagnostic) = diagnostics.get(CollisionDiagnostics::NARROW_PHASE) else {
return;
};
// Get the measurement and average.
if let (Some(measurement), Some(average)) = (diagnostic.measurement(), diagnostic.average()) {
let time = measurement.value;
println!(
"Narrow phase time: {time} (avg: {average}) {}",
diagnostic.suffix
);
}
}Physics Diagnostics UI
Having all of these diagnostics available is nice and all, but viewing and displaying them in a useful way involves a decent amount of code and effort.
To make this easier (and prettier!), an optional debug UI for displaying physics diagnostics
is provided with the diagnostic_ui feature and PhysicsDiagnosticsUiPlugin. It displays
all active built-in physics diagnostics in neat groups, with both current and average times shown.
Note: The text at the top right is not a part of the diagnostics UI, but a part of the examples.
The UI can be configured using the PhysicsDiagnosticsUiSettings resource.
Reworked Contact Pair Management
Most of the work this cycle was spent on reworking and optimizing contact pair management. The goal was to significantly reduce allocations and unnecessary work while increasing parallelism and allowing more efficient access to contacts associated with a given entity.
I will dive deep into some technical details here, but if you’re not interested in the nitty-gritty,
you can skip to the Collisions System Parameter section and the sections
that follow to see the user-facing impact.
What Was Wrong?
In past releases, contact pair management had lots of inefficiencies:
- We collect all broad phase pairs from scratch to a
Vecevery frame. - We iterate through all collisions at least three separate times every frame for handling contact status changes (reset statuses, report contacts, remove ended contacts).
- We have to do a lookup for previous contacts for every contact pair.
- The logic for resetting collision statuses involves ECS queries and confusing state management.
- The loop over pairs found by the broad phase collects collisions into new vectors every time.
Overall, there was an excessive amount of iteration and allocations, and the logic for managing contact statuses was very confusing,
In addition, the Collisions resource itself was not efficient enough for our purposes.
There are many cases where you may need to iterate over contacts associated with a specific entity,
but this required a linear scan through all collisions. To resolve this, a more graph-like structure is needed.
The New Approach
Avian 0.3 changes Collisions to a ContactGraph (more on that in the next section),
and reworks contact pair management to look like the following:
- Find new pairs in the broad phase and add them to the
ContactGraphdirectly. Duplicate pairs are avoided with fast lookups into aHashSet<PairKey>. - Iterate over all pairs in the
ContactGraphin parallel, maintaining thread-local bit vectors to track contact status changes (i.e. creation or removal). For each contact pair:- Test if AABBs still overlap.
- If the AABBs are disjoint, set
ContactPairFlags::DISJOINT_AABBand the status change bit for this contact pair. Continue to the next pair. - Otherwise, update the contact manifolds.
- Match contacts and transfer contact impulses for warm starting.
- Set flags for whether the contact is touching, and whether it started or stopped touching.
- Combine thread-local bit vectors into a global bit vector with bitwise OR.
- Serially iterate through set bits using the count trailing zeros method. For each contact pair with a changed status:
- If the AABBs are disjoint, send the
CollisionEndedevent (if events are enabled), updateCollidingEntities, and remove the pair from theContactGraph. - If the colliders started touching, send the
CollisionStartedevent (if events are enabled) and updateCollidingEntities. - If the AABBs stopped touching, send the
CollisionEndedevent (if events are enabled) and updateCollidingEntities.
- If the AABBs are disjoint, send the
This new approach was largely inspired by Box2D v3. It allows contacts to be updated in parallel while preserving determinism by processing pair addition and removal in a fast serial loop iterating over bit vectors. Consider reading the Simulation Islands article by Erin Catto for more details on the general idea (we don’t have simulation islands yet, but this builds towards it).
This improves several aspects:
- The broad phase doesn’t need to collect its pairs into a buffer, as it adds them to the
ContactGraphdirectly. - We only iterate through contact pairs once every frame for handling contact status changes, using bit scanning intrinsics to only iterate over pairs that actually changed.
- We are mutably iterating over the
ContactGraphdirectly, and don’t need to do separate lookups for previous contacts or perform any extra allocations.
As you may have noticed, a contact pair now exists between two colliders if their AABBs are touching,
even if the actual shapes aren’t. This is important for the pair management logic, though it does mean
that the ContactGraph can now have a lot more contact pairs in some cases.
Contact Graph
Previously, Collisions used an IndexMap to store collisions, keyed by (Entity, Entity).
The motivation was that we get Vec-like iteration speed with preserved insertion order
and fast lookups by entity pairs.
However, there are also scenarios where you may need to iterate over the entities colliding with a given entity,
such as for simulation islands or even gameplay logic. With just an IndexMap, this requires iterating over all pairs.
Avian 0.3 replaces Collisions with a ContactGraph that stores an undirected graph data structure
called UnGraph, based on petgraph, simplified and tailored for our use cases.
#[derive(Clone, Debug)]
pub struct UnGraph<N, E> {
nodes: Vec<Node<N>>,
edges: Vec<Edge<E>>,
}For the contact graph, nodes are collider entities, and edges are contact pairs.
However, we still also need a way to look up contact pairs by entities.
For this purpose, we have another custom data structure called SparseSecondaryEntityMap:
#[derive(Debug, Clone)]
struct Slot<T> {
generation: u32,
value: T,
}
#[derive(Debug, Clone)]
pub struct SparseSecondaryEntityMap<V, S: hash::BuildHasher = RandomState> {
slots: HashMap<u32, Slot<V>, S>,
}It is essentially a sparse map for associating data with entities in a generational arena (the ECS).
Additionally, a HashSet<PairKey> is used for fast lookups of contact pairs,
where PairKey stores a u64 hash of the two Entity indices in ascending order.
So, in summary, the ContactGraph is a combination of three data structures:
UnGraph<Entity, ContactPair>for storing the actual undirected contact graph.SparseSecondaryEntityMap<NodeIndex>for mappingEntityIDs to graph node indices.HashSet<PairKey>for fast lookups of contact pairs.
All of this complexity is abstracted behind an efficient and convenient API with methods like the following:
get,get_mutcontains,contains_keyiter,iter_mutiter_touching,iter_touching_mutcollisions_with,collisions_with_mutentities_colliding_with
and a few ones for adding and removing pairs, primarily intended for internals.
Collisions System Parameter
As described in the previous section, the old Collisions resource was replaced
by a new ContactGraph that contains both touching and non-touching contacts. However, this is inconvenient
for users, as most scenarios will only care about contacts where the colliders are actually touching.
Avian 0.3 provides a Collisions system parameter that wraps the ContactGraph with a simpler,
more user-friendly API that only returns touching contact pairs. From the user’s perspective,
it is basically identical to the old Collisions resource, with the main difference being
that you replace Res<Collisions> with just Collisions in your systems.
#[derive(Component)]
struct PressurePlate;
fn activate_pressure_plates(mut query: Query<Entity, With<PressurePlate>>, collisions: Collisions) {
for pressure_plate in &query {
// Compute the total impulse applied to the pressure plate.
let mut total_impulse = 0.0;
for contact_pair in collisions.collisions_with(pressure_plate) {
total_impulse += contact_pair.total_normal_impulse_magnitude();
}
if total_impulse > 5.0 {
println!("Pressure plate activated!");
}
}
}Unlike in past releases, Collisions does not allow mutating or removing contacts.
This limitation is intentional, as contact modification and filtering should typically
be handled via CollisionHooks to behave correctly.
If you need lower-level access to contact pairs, the ContactGraph resource can still be used directly.
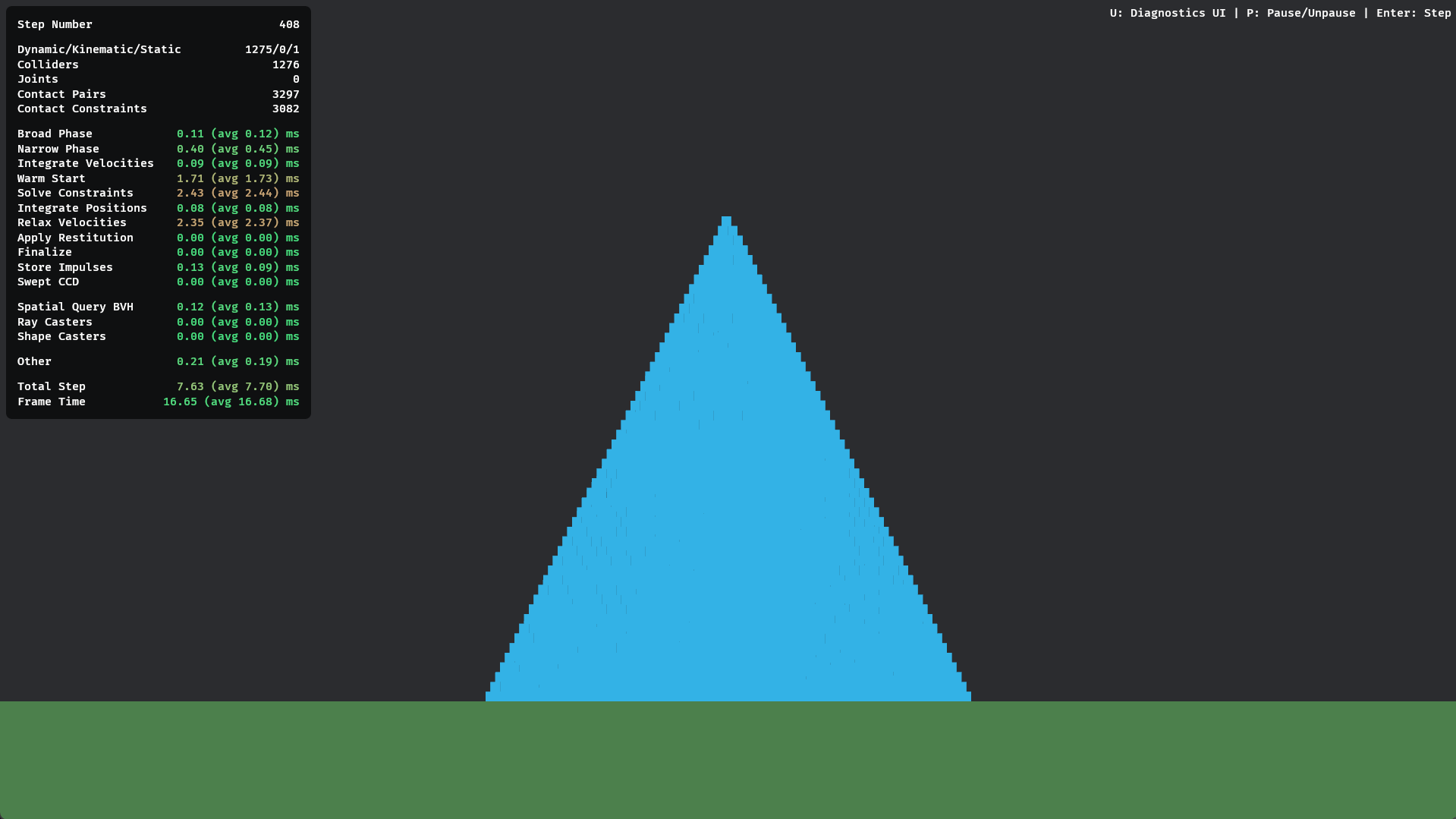
Performance
For a 2D pyramid with a base of 50 boxes, a total of 1276 colliders, using 6 substeps,
the performance profile with the parallel feature looks like this after 500 steps:

Notably:
- Narrow Phase: 4.5x as fast, despite also handling collision events
- Collision Events: This whole separate step is gone, and handled by the narrow phase
- Store Impulses: From 0.12 ms down to 0.03 ms, because fetching contacts is handled more efficiently
- Other: From 0.97 ms down to 0.18 ms, largely due to
wake_on_collision_endedbeing removed in favor of much more efficient logic integrated into the narrow phase
Single-threaded performance is also improved, but to a slightly lesser extent.
Faster Contact Constraint Generation
Past releases generated contact constraints in a separate serial step after the narrow phase. This required iterating through all contact pairs and querying for colliders and bodies a second time.
Avian 0.3 generates contact constraints directly in the narrow phase, pushing constraints
into buffers that are drained into the ContactConstraints resource at the end.
This removes the additional queries and iteration, and makes constraint generation multi-threaded.
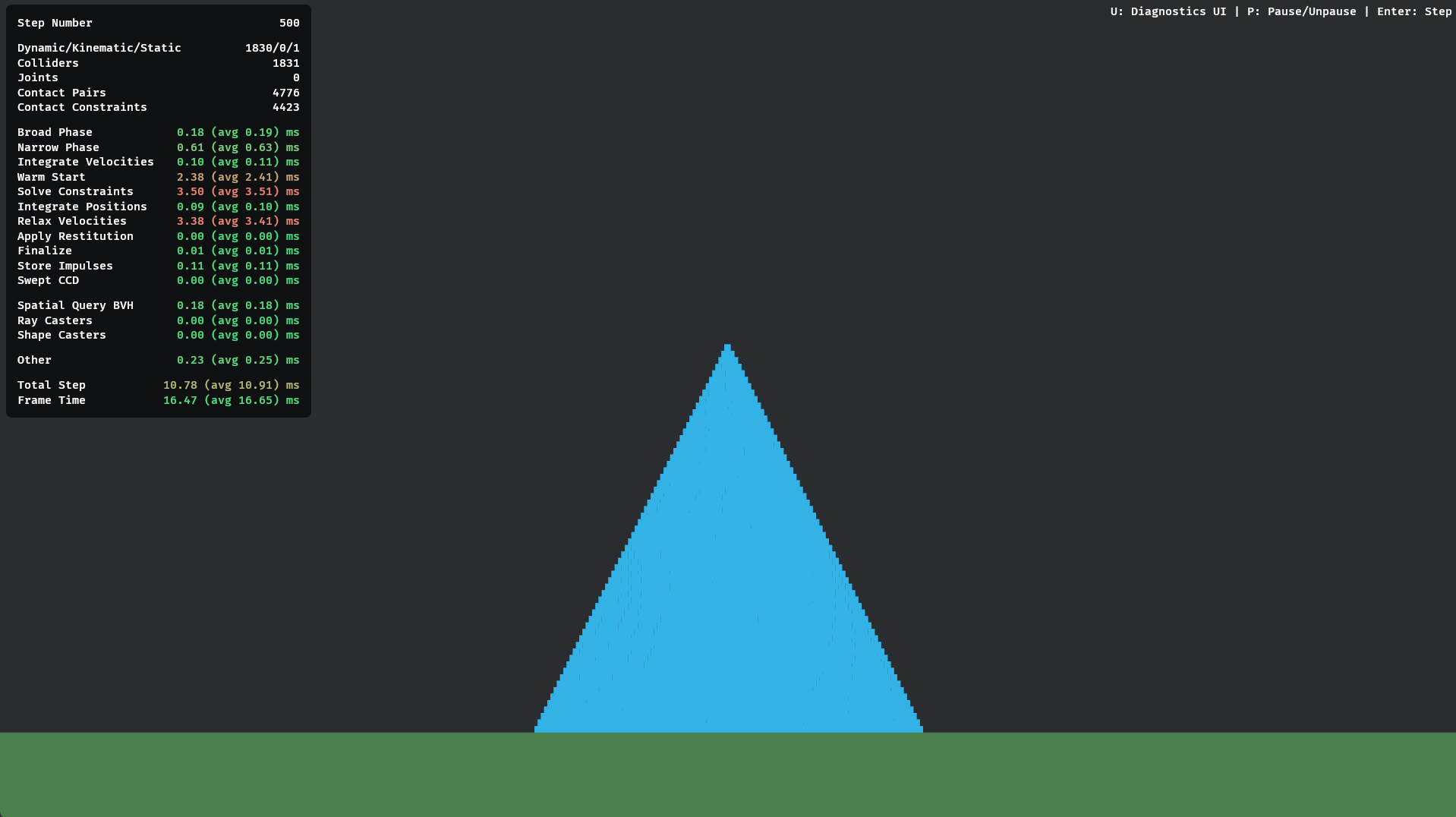
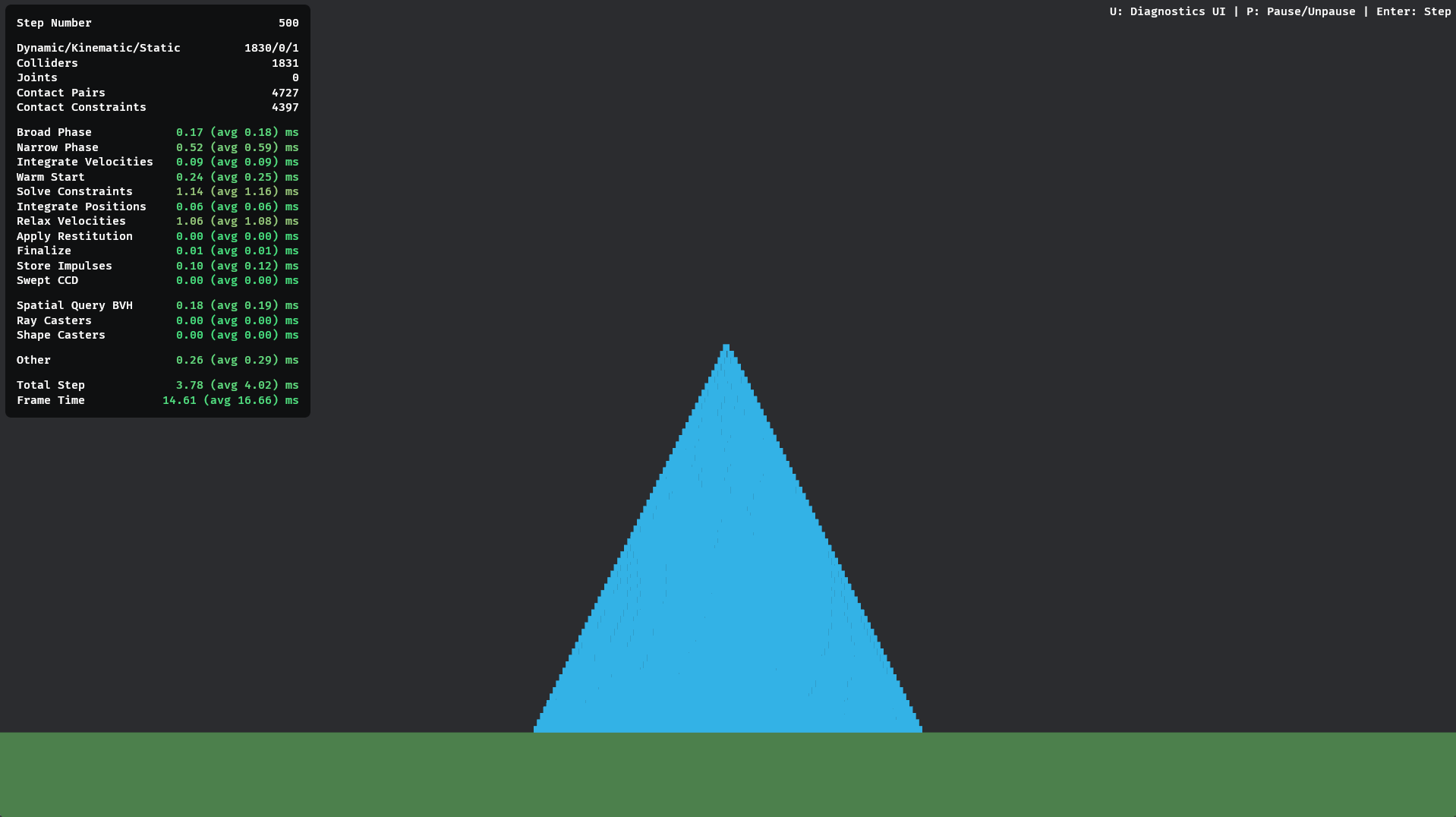
Performance
In a similar test scene as in the previous section, but with a slightly larger pyramid,
the performance profile with the parallel feature looks like this:

Note: The above image is from before we added sorting for the constraints to retain determinism, but it only adds about 0.03 ms.
Notably, the narrow phase takes slightly longer, as it now also handles contact constraint generation, but their combined overhead is much lower than before, from 1.26 ms down to 0.55 ms in this case.
You might also notice that the “Store Impulses” step is more expensive than before.
This is because the contact pair lookup can no longer be performed using the original pair index,
as constraints are generated before contact pair removal, and pair removal can invalidate indices.
One approach I tried is to modify the ContactGraph to maintain a stable order for its edge connectivity
(see #706), but it had some potential implications for determinism
that I didn’t like, so I left it for future investigation.
Improved Contact Types
As you may have noticed from some code examples, contact types have undergone several changes. This was done to make things more clear and consistent, and to optimize how contacts are stored.
Some noteworthy mentions:
Contactshas been renamed toContactPair.ContactDatahas been renamed toContactPoint.ContactPairandContactManifoldhave some new helpers for normal impulses.ContactPairnow stores flags for what kind of contact it is (e.g.SENSOR,TOUCHING,CONTACT_EVENTS), and has helpers such asis_sensor.ContactManifoldnow stores a single world-spacenormalinstead of two local normals.ContactManifoldnow stores surface material properties (see Per-Manifold Material Properties).
Other than that, the changes are mostly straightforward property renames, method deprecations, and minor changes to how values are stored. You can see a more complete list of changes in the migration guide on GitHub.
Collider Context
Some advanced users require custom collider types that need to obtain additional data
from the ECS, for example for a voxel collider. This was previously not possible,
as the AnyCollider trait’s methods did not provide ECS access.
Avian 0.3 adds a Context associated type to the AnyCollider trait,
allowing you to specify a system parameter to be passed to methods such as
aabb_with_context and contact_manifolds_with_context.
#[derive(Component)]
pub struct VoxelCollider;
#[derive(Component)]
pub struct VoxelData {
// Collider voxel data...
}
impl AnyCollider for VoxelCollider {
type Context = (
// You can query for extra components here
SQuery<&'static VoxelData>,
// Or use any other read-only system parameter
SRes<Time>,
);
fn aabb_with_context(
&self,
position: Vector,
rotation: impl Into<Rotation>,
context: AabbContext<Self::Context>,
) -> ColliderAabb {
// Compute the AABB
unimplemented!()
}
fn contact_manifolds_with_context(
&self,
other: &Self,
position1: Vector,
rotation1: impl Into<Rotation>,
position2: Vector,
rotation2: impl Into<Rotation>,
prediction_distance: Scalar,
context: ContactManifoldContext<Self::Context>,
) -> Vec<ContactManifold> {
let [voxels1, voxels2] = context.0.get_many([context.entity1, context.entity2])
.expect("our own `VoxelCollider` entities should have `VoxelData`");
let elapsed = context.1.elapsed();
// Compute the contact manifolds
unimplemented!()
}
}ColliderOf Relationship
Bevy 0.16 introduced initial support for entity-entity relationships,
and changed the Parent component to a ChildOf relationship component.
Avian 0.3 follows suit, and replaces its ColliderParent component with a new ColliderOf relationship.
It is used to attach colliders to rigid bodies, and is automatically inserted when adding a collider
on a rigid body or as a descendant of one.
In addition, rigid bodies now track which colliders are attached to them with the RigidBodyColliders component.
It is a RelationshipTarget, analogous to the Children component for parent-child relationships.
Other Changes and Fixes
There are still many other changes and fixes that I didn’t cover in detail. Some notable ones include:
- Take entity disabling into account for physics by @Jondolf in #694
- Clean up collision detection module structure and re-exports by @Jondolf in #698
- Reduce
SpatialQueryPipelineoverhead by @Jondolf in #696 - Fix incorrect computation of shifted angular inertia tensor by @Jondolf in bevy_heavy and parry/334
- Refactor to minimize
stdusage by @bushrat011899 in #668 - Use Bevy’s faster transform propagation by @ramirezmike in #725
A more complete list of changes can be found on GitHub.
In-Progress Work
This release ended up focusing mostly on the contact pair management rework and related improvements. I chose it as my focus area, as it was not only important for improving the current collision detection system, but also helps work towards other important features like simulation islands and the BVH broad phase.
However, there was still a lot of other exciting work that has been happening in the background, but didn’t make it for 0.3. Instead of the usual “What’s Next” section, I thought I’d highlight some of this ongoing work in a bit more detail to give a better idea of what we’ve been working on.
Solver Bodies
Based on typical performance profiles, it is quite clear that we are severely bottlenecked by the solver. The solver is responsible for actually applying forces and impulses, handling contacts and joints, and moving bodies based on velocity.
There is a lot that we could do to improve the situation. Some of the large but advanced optimizations include graph coloring to improve parallelism, and wide SIMD constraints to solve several constraints simultaneously, but there are also lower hanging fruit.
Namely, the ECS appears to be performing rather poorly for random access when fetching bodies required for constraints, and the body data itself is not stored as efficiently as it could be.
Right now, the solver is basically just iterating through constraints, and fetching a ton of data for the entities
of each constraint using Query::get. This involves a lot of overhead.
We can instead contiguously store body data required by the solver in special SolverBody structs:
// This representation is inspired by Box2D v3.
// 32 bytes in total
#[cfg(feature = "2d")]
pub struct SolverBody {
pub linear_velocity: Vec2, // 8 bytes
pub angular_velocity: f32, // 4 bytes
pub delta_position: Vec2, // 8 bytes
pub delta_rotation: Rot2, // 8 bytes
pub flags: BodyFlags, // 4 bytes
}
// This representation is my own current design :D
// 16 bytes in total
#[cfg(feature = "2d")]
pub struct SolverBodyInertia {
// Includes locked axes
effective_inv_mass: Vec2, // 8 bytes
effective_inv_inertia: f32, // 4 bytes
flags: InertiaFlags, // 4 bytes
}and sync the results back to the ECS after the solver. The result is a 3x performance improvement to the solver.
Crazy! However, this does unfortunately mean that we are “using the ECS” less, and it makes it more difficult for users to modify body data manually inside the solver. But I think ultimately this tradeoff will be worth it for the massive performance gains.
Why didn’t I implement this for Avian 0.3 then? It involves large changes to the internals, some of which may break advanced users. Before I release this to users, I need to test and polish things more, and make sure this doesn’t land in a half-baked state. Still, I hope to merge the initial work early in the release cycle and build more improvements on top.
Joint Rework
This has been on the roadmap ever since Avian 0.1. Despite moving contacts to an impulse-based solver, we still use XPBD for joints. Due to potential (though unlikely) patenting risks, missing features, and incompatibilities with future optimizations, we want to move joints to an impulse-based solver as well.
It’s a massive undertaking, but I finally had some progress towards a prototype, having implemented functional revolute joints and spherical joints with customizable angle limits.
I would really, really like to finish this in time for 0.4, but we’ll just have to see how it goes!
BVH Broad Phase
Currently, we still use an extremely simple sweep-and-prune algorithm for broad phase collision detection. While it has worked well enough so far, it has started showing up more in traces as performance has become a larger focus.
We intend to replace sweep-and-prune with an approach using bounding volume hierarchies (BVH), with separate trees for active bodies and static or sleeping bodies. @DGriffin91’s OBVHS crate is the current front-runner for the BVH implementation, and they have been working on leaf insertion and removal to better fit our needs.
I’ve started initial experimentation with the BVH broad phase, but it is still in the early stages.
Spatial Query Pipeline Rework
Spatial queries are currently directly tied to Parry and the Collider type.
This means that alternative collision backends cannot reuse the existing infrastructure
around spatial queries.
Additionally, if we switch to a BVH broad phase, we’d want to reuse the same acceleration structure for spatial queries.
But if we intend to use OBVHS for the broad phase, this wouldn’t work as long as spatial queries use Parry’s Qbvh!
Luckily, @NiseVoid has been working on a new spatial query pipeline that is fully decoupled from Parry and uses OBVHS for the acceleration structure. If all goes well, it should hopefully give us much more flexible, backend-agnostic spatial queries.
In the future, we could even consider splitting this further into its own crate, providing a generic interface for spatial queries in Bevy even without any physics or collision detection.
Peck
As I have mentioned a few times in the past, I have been working on my own collision detection library to use in Avian, as we are currently a bit constrained by Parry. The goal is to have a more Bevy-native implementation using Bevy’s shape primitives, tailored to better fit our needs.
Peck is still in its early stages, but steady progress is being made. In particular, I have now implemented contact manifold computation for both 2D and 3D, allowing us to simulate contacts for arbitrary convex shapes:
Additionally, I have implemented analytic solutions for point queries and closest surface normal queries for most 2D shapes and 3D shapes:
Finally, @atlv24 has been working on improved GJK and EPA implementations inspired by Jolt. Based on initial benchmarks, it seems to be more than 2x as fast as Parry’s implementation, and there is still more room for improvement. Exciting stuff! It is currently separate from Peck, but we have started initial work on adopting it.
no_std Compatibility
Bevy 0.16 got initial support for no_std targets.
While it is unclear how well a full-blown physics engine would work in no_std,
it would be cool to try it out, and we made some progress towards it!
I improved no_std compatibility in Parry (see #330),
and opened a PR for Avian to add no_std support.
However, Parry currently still requires synchronization primitives for some important traits,
breaking support for platforms without them (most retro consoles and embedded systems).
Because of this, I have left it for now, but will revisit it if/when Parry has wider support for no_std.
Force Rework
The current API for forces and impulses is a bit clunky and confusing.
Both ExternalForce and ExternalTorque as well as ExternalImpulse and ExternalAngularImpulse
can be either persistent or cleared after every physics step, and applying local forces is difficult.
Additionally, there is no easy way to apply acceleration in a mass-independent way that integrates with substepping.
I have been exploring some alternative approaches, and the current design looks like this:
ConstantForce,ConstantTorque,ConstantLinearAcceleration, andConstantAngularAccelerationcomponents for persistent forces and torques.ForceHelpersystem parameter for applying one-shot forces, torques, and impulses.- Internally, all the forces (and gravity) are combined into
LinearVelocityIncrementandAngularVelocityIncrementcomponents, which can be efficiently applied at each substep.
In practice, using the ForceHelper system parameter would look roughly like this:
fn orbit(query: Query<Entity, With<Planet>>, mut forces: ForceHelper) {
for planet in &query {
// ...compute gravity force...
forces.entity(planet)
.apply_force(gravity_force)
.apply_local_torque(spin_torque);
}
}This kind of API would be closer to what you might be used to from other engines,
such as Unity’s Rigidbody.AddForce
or Godot’s RigidBody3D.apply_force.
In comparison to the current two components, it provides much more flexibility
and is significantly less error-prone.
Character Controller Working Group
Most games need a character controller. Over time, several people have implemented their own versions with various move-and-slide algorithms. Ever since the start of Avian, there has also been interest in having something official built in.
Recently, out of the blue, an Avian Character Controller Working Group was formed! The group is still largely in the prototyping stages, working on test scenes, iterating on making the core move-and-slide logic rock-solid, and sketching out the high-level design goals, but it is making steady progress.
The end-goal is to upstream a robust, extensible set of features to allow people to comfortably implement all sorts of character behavior, while creating examples of more feature-complete character controllers to demonstrate how the features can be used for different genres.
It is very WIP, but the repository for the current experiments can be found here. If you want to see character controllers in Avian, consider joining the effort!
Support Me
While Avian will always be free and permissively licensed, developing and maintaining it takes a lot of time and effort.
If you find my work valuable, consider supporting me through GitHub Sponsors. This is ultimately my hobby, but by supporting me you can help make it more sustainable.
Thank you ❤️